
Description
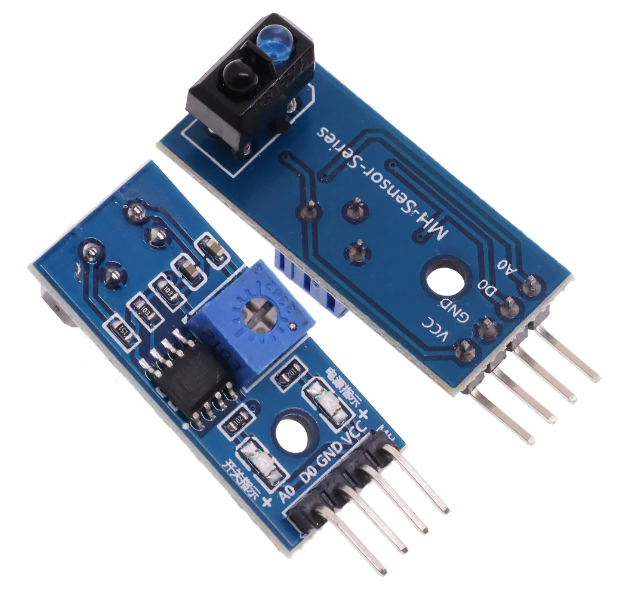
Le TCRT5000 est un module de capteur infrarouge couramment utilisé dans diverses applications de robotique et d’électronique. Il se compose d’un émetteur LED infrarouge et d’un phototransistor montés côte à côte. La LED émet une lumière infrarouge, qui est réfléchie par tout objet avec lequel elle entre en contact. Le phototransistor détecte la lumière réfléchie et délivre une tension proportionnelle à l’intensité de la lumière.
Le TCRT5000 peut être utilisé pour détecter des objets, suivre des lignes et mesurer des distances. Il s’agit d’un capteur relativement peu coûteux et facile à utiliser, ce qui en fait un choix populaire pour les amateurs et les créateurs.
Voici quelques spécifications du TCRT5000 :
- Tension de fonctionnement : 3,3 V à 5 V
- Sortie : numérique (haute ou basse)
- Distance de détection : 1 mm à 25 mm
- Sensibilité réglable
Comment utiliser le module de capteur IR TCRT5000 avec Arduino
Étape 1 : Définition des broches

Étape 2 : Préparation du matériel



Pour ce tutoriel, nous avons besoin de ces éléments :
1. Arduino UNO.
2. Module de capteur infrarouge TCRT 5000.
3. Câble mâle vers femelle.
Étape 3 : Connexion des broches


Étape 4 : Exemple de code source
const int pinIRd = 8 ; const int pinIRa = A0; const int pinLED = 9 ; int IRvaleurA = 0 ; int IRvaleurD = 0 ; configuration vide() { Série.begin(9600); pinMode(pinIRd,ENTRÉE); pinMode(pinIRa,ENTRÉE); pinMode(pinLED,SORTIE); } boucle vide() { Serial.print("Lecture analogique="); Série.print(IRvalueA); Serial.print("\t Lecture numérique="); Série.println(IRvalueD); délai(1000); IRvalueA = analogRead(pinIRa); IRvalueD = digitalRead(pinIRd); }
Étape 7 : Résultat

L’image ci-dessus montre le résultat sur le Serial



Reviews
There are no reviews yet.