
Description
Petit et léger avec une puissance de sortie élevée. Le servomoteur peut pivoter d’environ 180 degrés (90 dans chaque direction) et fonctionne comme les types standard mais plus petit. Vous pouvez utiliser n’importe quel code, matériel ou bibliothèque de servomoteur pour contrôler ces servomoteurs. Idéal pour les débutants qui veulent faire bouger des objets sans construire un contrôleur de moteur avec rétroaction et boîte de vitesses, d’autant plus qu’il s’intègre dans de petits espaces. Il est livré avec 3 cornes (bras) et du matériel.
Caractéristiques
- Poids : 9 g
- Dimensions : 22,2 x 11,8 x 31 mm environ.
- Couple de décrochage (4,8 V) : 17,5 oz/po (1 kg/cm)
- Vitesse de fonctionnement : 0,1 s/60 degrés
- Tension de fonctionnement : 4,8 V (~5 V)
- Largeur de bande morte : 10 μs
- Plage de température : 0 ºC à 55 ºC
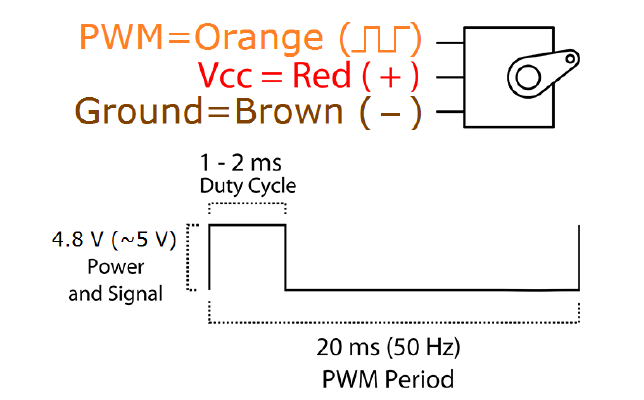
La position « 0 » (impulsion de 1,5 ms) est au milieu, « 90 » (impulsion d’environ 2 ms) est tout à droite, « -90 » (impulsion d’environ 1 ms) est tout à gauche.
Premiers pas avec le servomoteur SG909G
Ici, nous allons voir comment connecter un servomoteur puis comment le tourner dans différentes positions.
Matériel requis
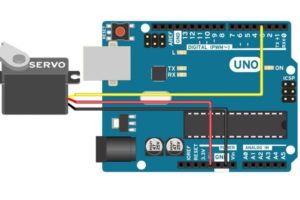
- Arduino Uno
- Un servomoteur
- Fils de liaison
Connexion du matériel
Code
Le code suivant fera tourner un servomoteur à 0 degré, attendra 1 seconde, puis le fera tourner à 90 degrés, attendra une seconde de plus, le fera tourner à 180 degrés, puis reviendra en arrière.
// Inclure la bibliothèque Servo #include <Servo.h> // Déclarer la broche Servo int servoPin = 3; // Créer un objet servo Servo Servo1; configuration vide() { // Nous devons attacher le servo au numéro de broche utilisé Servo1.attach(servoPin); } boucle vide(){ // Faire passer le servo à 0 degrés Servo1.write(0); délai(1000); // Faire tourner le servo à 90 degrés Servo1.write(90); délai(1000); // Faire tourner le servo à 180 degrés Servo1.write(180); délai(1000); }
Le forfait comprend : 1× micro-servomoteur SG90

