
Description
Description
Le capteur suiveur de ligne rouge 3 canaux TCRT5000 est doté de trois canaux de capteurs infrarouges qui utilisent la lumière infrarouge pour distinguer les couleurs sombres et claires, en particulier le noir et le blanc, en fonction de la différence de couleur de surface. Il fonctionne sur 5 V et produit une faible sortie lors de la détection d’une ligne noire et une sortie élevée lors de la détection d’une ligne blanche. Le capteur est facile à installer grâce à son trou de boulon fixe et est bénéfique pour les projets de robotique, en particulier pour la création de robots suiveurs de ligne. Il émet un faisceau infrarouge sur un objet et mesure la quantité de lumière réfléchie pour suivre et suivre avec précision les lignes.
Le forfait comprend:
- 1 x Capteur suiveur de ligne 3 canaux Funduino TCRT5000 Rouge
Caractéristiques:
- Utilise trois capteurs infrarouges pour détecter les différences de couleur de surface, en particulier les lignes noires et blanches
- Fournit une sortie numérique, avec une sortie faible lors de la détection d’une ligne noire et une sortie élevée lors de la détection d’une ligne blanche
- Tension de fonctionnement de 5V
- Conception compacte avec un trou de boulon fixe pour une installation facile
- Convient aux robots suiveurs de ligne, aux robots sumo/mini-sumo et à d’autres applications nécessitant une détection de suivi infrarouge
- Émet un faisceau de lumière infrarouge sur l’objet et mesure la quantité de lumière réfléchie
- Peut être utilisé pour divers projets de robotique qui nécessitent un suivi et une détection précis des lignes
Description:
Le capteur de détection de suivi infrarouge à 3 canaux Line Follower TCRT5000 Red est un capteur électronique utilisé dans les projets de robotique. Le capteur est composé de 3 canaux de capteurs infrarouges qui détectent la différence de couleur de surface en distinguant les couleurs sombres et claires, en particulier le noir et le blanc. Le capteur fonctionne sur une tension de 5 V et possède un trou de boulon fixe pour une installation facile. Lorsque le capteur détecte une ligne noire, la sortie est faible, tandis que la sortie est élevée lorsqu’il détecte une ligne blanche. Le capteur optique réfléchissant TCRT5000 est conçu pour les robots suiveurs de ligne, les robots sumo/mini-sumo et d’autres applications qui nécessitent une détection de suivi infrarouge. Avec une taille de 118 mm x 80 mm x 10 mm et un poids de seulement 11 grammes, ce capteur est compact et facile à utiliser. Il fonctionne en projetant un faisceau de lumière infrarouge sur un objet et en mesurant la quantité de lumière réfléchie. Ce capteur est un outil précieux pour quiconque travaille sur des projets de robotique qui nécessitent un suivi et une détection précis.
Principe de fonctionnement :
Le module IR suiveur de ligne 3CH Funduino, basé sur le capteur optique réfléchissant TCRT5000, fonctionne sur le principe de détection de la différence de couleur de surface en utilisant trois capteurs infrarouges (IR) pour distinguer les couleurs sombres et claires, en particulier les lignes noires et blanches. Lorsque le module est placé sur une surface, il émet un faisceau lumineux IR sur la surface et mesure la quantité de lumière réfléchie. Lorsque le module se trouve sur une surface de couleur claire (généralement blanche), la lumière IR sera réfléchie vers le capteur, ce qui produira un signal de sortie élevé. En revanche, lorsque le module se trouve sur une surface de couleur foncée (généralement noire), la lumière IR sera absorbée par la surface et ne sera pas réfléchie vers le capteur, ce qui produira un signal de sortie faible.
Ce signal de sortie peut ensuite être utilisé pour contrôler le mouvement d’un robot afin de suivre et de suivre avec précision les lignes. Le module est conçu avec trois capteurs IR alignés sur une ligne pour fournir une lecture plus précise des différences de couleur de surface, ce qui en fait un composant idéal pour une utilisation dans les robots suiveurs de lignes et d’autres applications similaires.
Brochage :
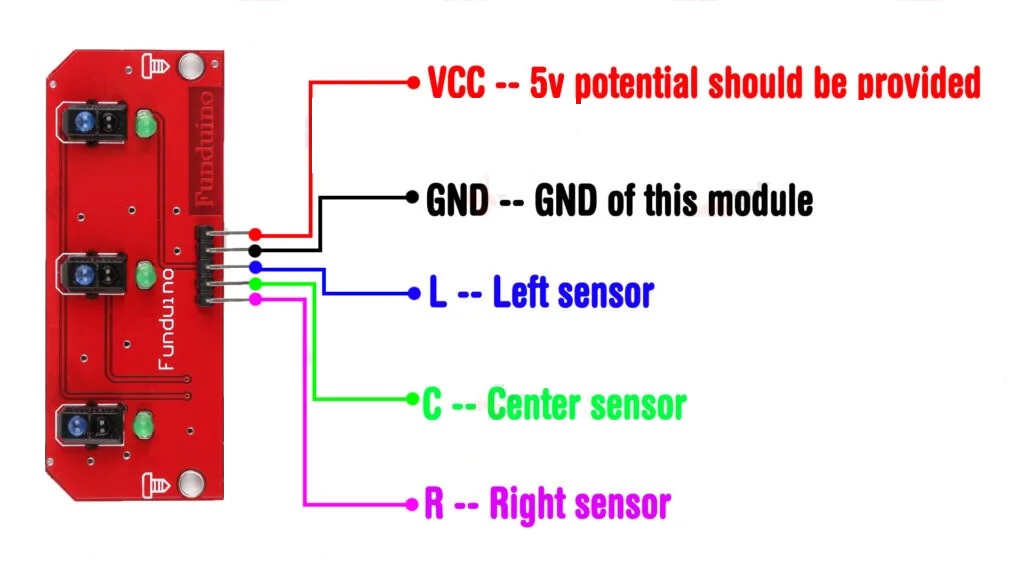
- VCC : Cette broche est utilisée pour alimenter le module et doit être connectée à une source d’alimentation 5 V.
- GND : cette broche est la connexion à la terre du module et doit être connectée à la terre de la source d’alimentation.
- L : Cette broche est la sortie numérique du capteur gauche, qui détecte si le module se trouve sur une surface sombre ou claire sur le côté gauche du module.
- C : Cette broche est la sortie numérique du capteur central, qui détecte si le module se trouve sur une surface sombre ou claire au centre du module.
- R : Cette broche est la sortie numérique du capteur droit, qui détecte si le module se trouve sur une surface sombre ou claire sur le côté droit du module.
Les sorties L, C et R peuvent être utilisées pour contrôler le mouvement d’un robot en fonction de la position de la ligne suivie, ce qui en fait un composant idéal pour une utilisation dans les robots suiveurs de ligne et d’autres applications similaires.
Applications :
- Robots suiveurs de ligne : le module peut être utilisé pour construire des robots capables de suivre une ligne de manière autonome, ce qui les rend utiles pour des applications telles que l’automatisation des entrepôts, les systèmes de transport et même les manèges des parcs d’attractions.
- Véhicules à guidage automatique (AGV) : les AGV sont utilisés pour transporter des matériaux et des marchandises dans les environnements de fabrication et d’entreposage. Le module IR suiveur de ligne Funduino 3CH peut être utilisé pour guider ces véhicules le long de trajectoires prédéterminées et éviter les obstacles.
- Contrôle du trafic : le module peut être utilisé pour détecter et suivre les lignes sur les routes, permettant aux systèmes automatisés de contrôle du trafic de gérer le flux de trafic de manière plus efficace et plus sûre.
- Automatisation industrielle : Le module peut être utilisé pour guider des bras robotisés ou d’autres machines dans des applications d’automatisation industrielle, telles que des chaînes de montage ou des systèmes de manutention.
- Projets éducatifs : Le module est un composant populaire pour les projets de robotique éducatifs, aidant les étudiants à en apprendre davantage sur l’électronique, les capteurs et la robotique tout en construisant leurs propres robots suiveurs de ligne.
Circuit:
Connectez la carte Arduino au module de capteur IR à 3 voies. Utilisez le schéma de circuit ci-dessous :

Bibliothèque:
Pas besoin de bibliothèque ici.
Code:
Le code définit les connexions des broches et configure la carte Arduino. Il lit ensuite les valeurs des 3 capteurs infrarouges connectés aux broches 6, 7 et 8. En fonction des valeurs des capteurs, le code appelle différentes fonctions pour contrôler les deux moteurs. Le moteur gauche est contrôlé par les broches ENA, IN1 et IN2 tandis que le moteur droit est contrôlé par les broches ENB, IN3 et IN4.
#définir la gauche 6 #define centre 7 #définir le droit 8 //moteur un #définir ENA 9 #définir IN1 2 #définir IN2 3 //moteur deux #define ENB 10 #définir IN3 4 #définir IN4 5 int Speed = 120; // vitesse de ce robot configuration vide() { Série.begin(9600); pinMode(gauche, ENTRÉE); pinMode(centre, ENTRÉE); pinMode(droite, INPUT); pinMode(ENA, SORTIE); pinMode(IN1, OUTPUT); pinMode(IN2, OUTPUT); pinMode(IN3, SORTIE); pinMode(IN4, SORTIE); pinMode(ENB, SORTIE); } boucle vide() { bool leftV = digitalRead(gauche); bool centerV = digitalRead(centre); bool rightV = digitalRead(droite); Serial.println(droiteV); si (gaucheV == 1 && centreV == 0 && droiteV == 1) { voiture en avant(); Serial.println("transférer"); } sinon si (gaucheV == 0 && centreV == 0 && droiteV == 0) { arrêt de voiture(); } sinon si (gaucheV == 1 && centreV == 1 && droiteV == 1) { arrêt de voiture(); } sinon si (gaucheV == 0 && centreV == 0 && droiteV == 1) { carturngauche(); } sinon si (gaucheV == 1 && centreV == 0 && droiteV == 0) { carturnright(); } sinon si (gaucheV == 0 && centreV == 1 && droiteV == 1) { carturngauche(); } sinon si (gaucheV == 1 && centreV == 1 && droiteV == 0) { carturnright(); } } void voiture en avant() { analogWrite(ENA, Vitesse); analogWrite(ENB, Vitesse); digitalWrite(IN1, HAUT); digitalWrite(IN2, BAS); digitalWrite(IN3, HAUT); digitalWrite(IN4, BAS); } void carturnleft() { analogWrite(ENA, Vitesse); analogWrite(ENB, Vitesse); digitalWrite(IN1, BAS); digitalWrite(IN2, HAUT); digitalWrite(IN3, HAUT); digitalWrite(IN4, BAS); } void carturnright() { analogWrite(ENA, Vitesse); analogWrite(ENB, Vitesse); digitalWrite(IN1, HAUT); digitalWrite(IN2, BAS); digitalWrite(IN3, BAS); digitalWrite(IN4, HAUT); } void carStop() { digitalWrite(IN1, BAS); digitalWrite(IN2, BAS); digitalWrite(IN3, BAS); digitalWrite(IN4, BAS); }
Détails techniques :
- Capteur optique réfléchissant TCRT5000
- 3 capteurs alignés en ligne
- Sortie numérique
- Tension de fonctionnement : 5 V
- Taille : 118 mm x 80 mm x 10 mm
- Poids : 11



Reviews
There are no reviews yet.