Description
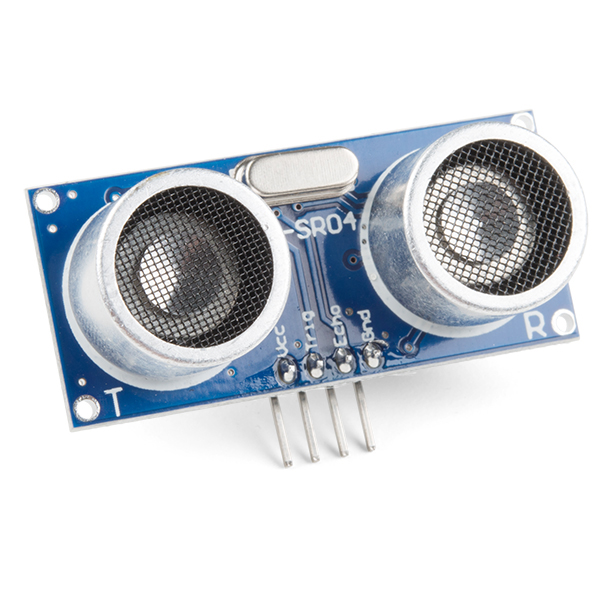
Il s’agit du capteur de mesure à ultrasons HC-SR04. Il offre une fonctionnalité de mesure sans contact de 2 à 400 cm avec une précision de mesure pouvant atteindre 3 mm. Chaque module HC-SR04 comprend un émetteur à ultrasons, un récepteur et un circuit de commande.
Il n’y a que quatre broches dont vous devez vous sur le HC-SR04 :
- VCC (Alimentation),
- Trigonométrie (Déclencheur),
- Echo (Recevoir), et
- GND (Masse).
Vous trouverez ce capteur très facile à installer et à utiliser pour votre prochain projet de télémétrie !
Caractéristiques
- Tension de fonctionnement : 5 V CC
- Courant de fonctionnement : 15 mA
- Angle de mesure : 15°
- Distance de détection : 2 cm – 4 m
Comment ça marche ?
Le capteur à ultrasons utilise un sonar pour déterminer la distance par rapport à un objet. Voici ce qui se passe :
- L’émetteur (broche trigonométrique) envoie un signal : un son haute fréquence.
- Lorsque le signal trouve un objet, il est réfléchi et…
- … l’émetteur (broche d’écho) le reçoit.

Le temps entre l’émission et la réception du signal nous permet de connaître la distance qui nous sépare d’un objet. Cela est possible parce que nous connaissons la vitesse du son dans l’air.

Épingles
- VCC : +5 V CC
- Trigonométrie : Déclencheur (ENTRÉE)
- Écho : Écho (SORTIE)
- Terre : Terre
Premiers pas avec le capteur à ultrasons – HC-SR04
Ce capteur est vraiment cool et populaire parmi les bricoleurs Arduino. Nous vous proposons ici un exemple d’utilisation du capteur à ultrasons HC-SR04 avec l’Arduino. Dans ce projet, le capteur à ultrasons éclairé et écrit la distance à un objet sur le moniteur série.
L’objectif de ce projet est de vous aider à comprendre le fonctionnement de ce capteur. Vous pourrez ensuite utiliser cet exemple dans vos propres projets.
Étape 1 : Matériel requis
- Arduino Uno
- Capteur à ultrasons
- Planche à pain
- Fil de liaison
Étape 2 : Connexion du matériel

Le tableau suivant montre les connexions que vous devez effectuer :
| Capteur à ultrasons HC-SR04 | Arduino |
| CCV: | 5V |
| Trigonométrie: | Broche 11 |
| Écho: | Broche 12 |
| TERRE: | Terre |
Étape 3 : Bibliothèque et exemple
Il existe une bibliothèque Arduino appelée NewPing qui peut vous faciliter la vie lorsque vous utilisez ce capteur.
Télécharger ici : Télécharger la bibliothèque NewPing
Exemple:
Téléchargez le code suivant sur votre IDE Arduino.
int trigPin = 11 ; // Déclencheur int echoPin = 12; // Écho longue durée, cm, pouces; configuration vide() { //Début du port série Série.begin (9600); //Définir les entrées et les sorties pinMode(trigPin, SORTIE); pinMode(echoPin, ENTRÉE); } boucle vide() { // Le capteur est déclenché par une impulsion HAUTE de 10 microsecondes ou plus. // Donnez au préalable une courte impulsion BASSE pour garantir une impulsion HAUTE propre : digitalWrite(trigPin, BAS); delayMicroseconds(5); digitalWrite(trigPin, HAUT); delayMicroseconds(10); digitalWrite(trigPin, BAS); // Lire le signal du capteur : une impulsion HAUTE dont // la durée est le temps (en microsecondes) écoulé depuis l'envoi // du ping à la réception de son écho sur un objet. pinMode(echoPin, ENTRÉE); durée = pulseIn(echoPin, HIGH); // Convertir le temps en distance cm = (durée/2) / 29,1 ; // Diviseur par 29,1 ou multiplicateur par 0,0343 pouces = (durée/2) / 74 ; // Diviseur par 74 ou multiplicateur par 0,0135 Série.print("Distance : "); Serial.print(pouces); Serial.print(" pouces\t"); Série.print(cm); Série.print("cm"); Série.println(); délai(250); }
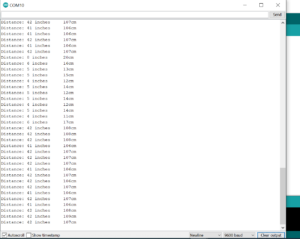
Après avoir téléchargé le code, ouvrez le moniteur série et vous obtiendrez des valeurs qui ressemblent à ceci :
Le forfait comprend : 1×module de capteur à ultrasons HC-SR04



